第一章 单元测试
1、 问题:我们家用抽水马桶中的水箱水位控制系统是一个闭环控制系统。( )
选项:
A:对
B:错
答案: 【
对
】
2、 问题:在光伏发电控制系统中,因为光照的间歇性、波动性等,其输出电压与电流通常都是实时波动的,然而基于经济效益的需求,通常会采取最大功率点跟踪的控制方法来保障系统输出功率的最大化。请问最大功率跟踪控制属于哪一类控制( )
选项:
A:开环控制系统
B:闭环控制系统
C:最优控制系统
D:线性控制系统
E:非线性控制系统
答案: 【
闭环控制系统
非线性控制系统
】
3、 问题:书第16页 1-9题中,图1-21所示的水箱水位控制系统的控制器是( )
选项:
A:水箱
B:浮子
C:连杆与铰链
D:入水阀门
E:出水阀门
答案: 【
连杆与铰链
】
第二章 单元测试
1、 问题:若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应c(t)=1-e-2t+e-t,则该系统的传递函数为( )。
选项:
A:
B:
C:
D:
答案: 【
】
2、 问题: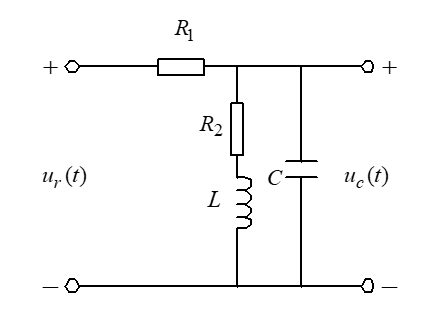
上图所示电路的传递函数Uc(s)/Ur(s)为( )。
选项:
A:
B:
C:
D:
答案: 【
】
3、 问题: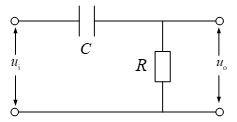
上图所示电路模型的传递函数Uo(s)/Ui(s)是属于( )环节。
选项:
A:惯性
B:理想微分
C:实际微分
D:振荡
答案: 【
实际微分
】
4、 问题:系统方框图如下图所示: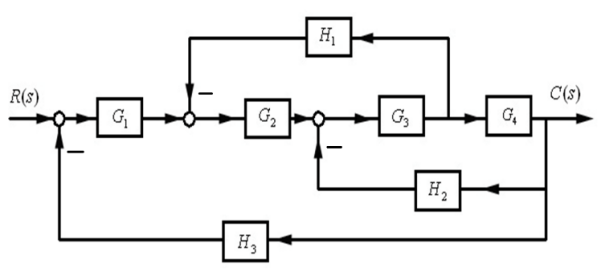
则该系统的传递函数C(s)/R(s)为( )。
选项:
A:
B:
C:
D:
答案: 【
】
5、 问题:系统的信号流图如下图所示: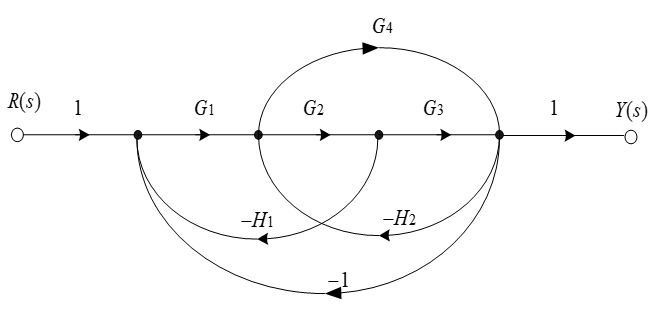
则该系统的传递函数Y(s)/R(s)为( )。
选项:
A:
B:
C:
D:
答案: 【
】
第三章 单元测试
1、 问题:某系统的单位阶跃响应曲线如图所示: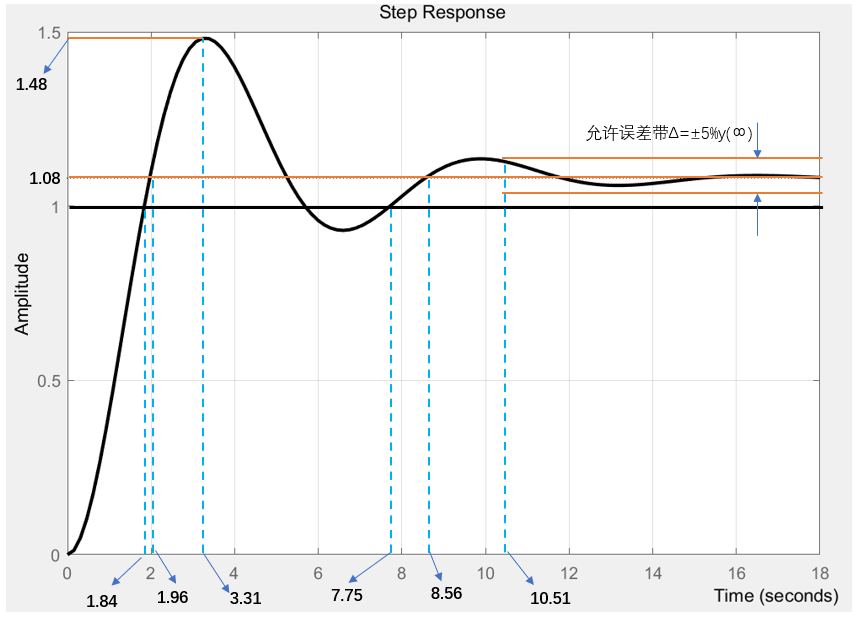
则系统的上升时间 和超调百分比
和超调百分比 是( )。
是( )。
选项:
A:
B:
C:
D:
答案: 【
】
2、 问题:如图所示单位负反馈系统: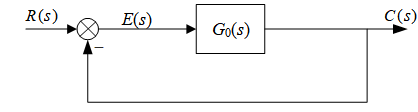
闭环传递函数为 ,则其开环传递函数G0(s)为( )。
,则其开环传递函数G0(s)为( )。
选项:
A: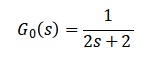
B: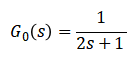
C:
D:
答案: 【
】
3、 问题:某单位反馈系统的闭环传递函数为 ,则系统单位斜坡响应的稳态误差为( )。
,则系统单位斜坡响应的稳态误差为( )。
选项:
A:0
B:0.5
C:1·
D:2
答案: 【
2
】
4、 问题:设系统的方框图如图所示: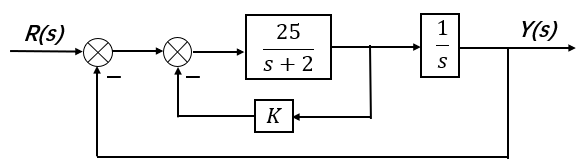
求使阻尼比 的K值及单位阶跃响应的上升时间
的K值及单位阶跃响应的上升时间 、峰值时间
、峰值时间 、超调百分比
、超调百分比 和调整时间
和调整时间 ( )。
( )。
选项:
A:
B:
C:
D:
答案: 【
】
5、 问题:已知某系统方框图如下: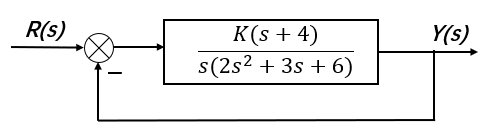
则使系统稳定的K值范围是( )
选项:
A:6<K<24
B:0<K<18
C:0<K<6
D:4<K<6
答案: 【
0<K<6
】
第四章 单元测试
1、 问题:在采用合适比例调节的控制系统中,现在比例作用基础上适当增加微分作用,则系统设定值阶跃响应的最大动态偏差会( )。
选项:
A:变大
B:变小
C:不变
答案: 【
变小
】
2、 问题:某系统对象为0型,现在合适的比例作用基础上适当增加积分作用,则系统设定值阶跃响应的静态偏差会( )。
选项:
A:变大
B:变小
C:变为0
答案: 【
变为0
】
3、 问题:在采用合适比例调节的控制系统中,现在比例作用基础上适当增加积分作用,则系统设定值阶跃响应的调整时间会( )。
选项:
A:变大
B:变小
C:不变
答案: 【
变大
】
4、 问题:在采用合适比例调节的控制系统中,现在比例作用基础上适当增加积分作用,为了得到相同的稳定性,则应当( )控制器的比例系数。
选项:
A:增加
B:减小
C:不变
答案: 【
减小
】
5、 问题:对象为0型系统,增加控制器的积分时间常数Ti,则系统设定值阶跃响应的跟踪误差会( )。
选项:
A:变大
B:变小
C:不变
答案: 【
不变
】
第五章 单元测试
1、 问题:已知系统开环零极点分布如图所示,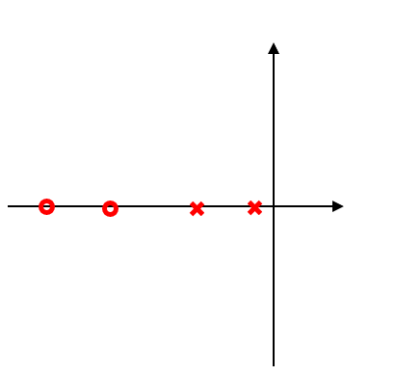
则系统的根轨迹图应为( )。
选项:
A: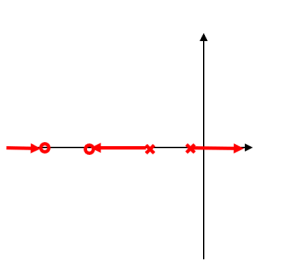
B: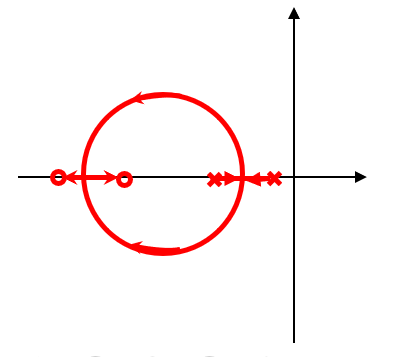
C: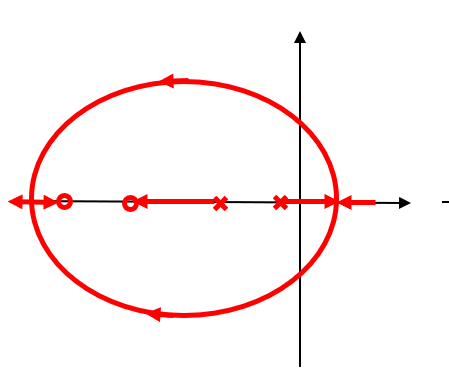
D: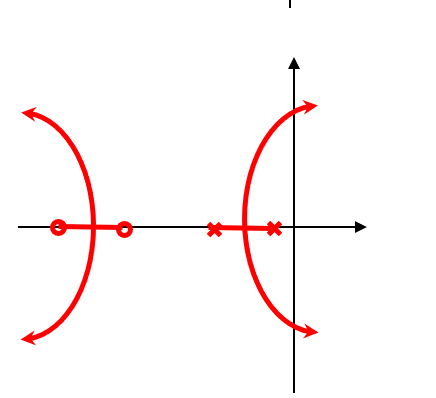
答案: 【
】
2、 问题:已知系统开环零极点分布如图所示,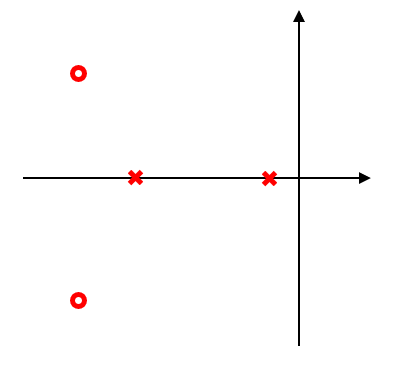
则系统的根轨迹图应为( )。
选项:
A: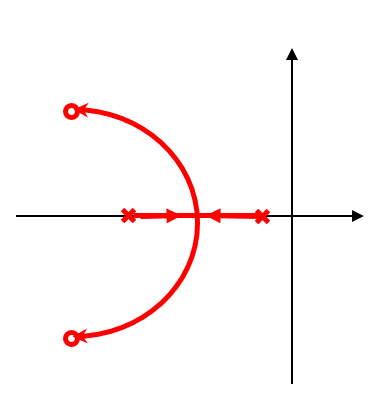
B: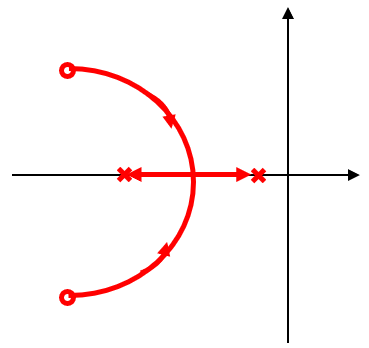
C: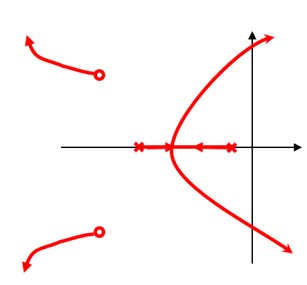
D: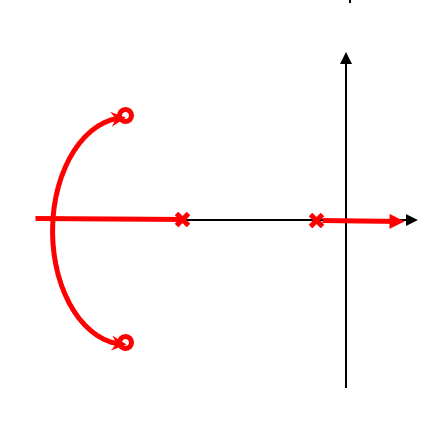
答案: 【
】
3、 问题:已知系统开环零极点分布如图所示,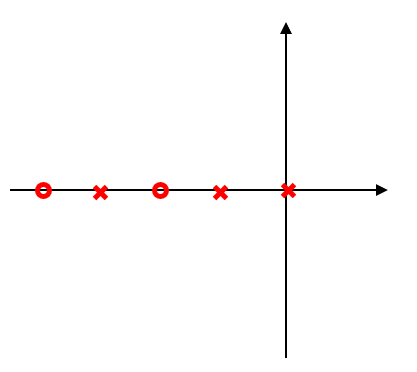
则系统的根轨迹图应为( )。
选项:
A: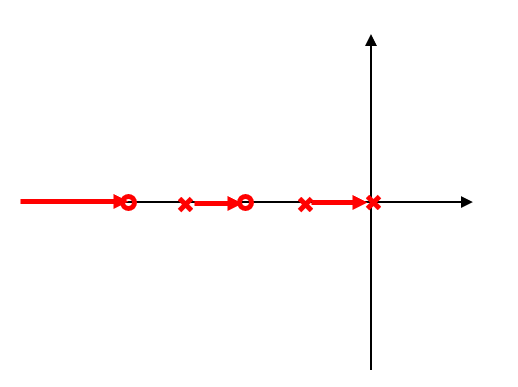
B: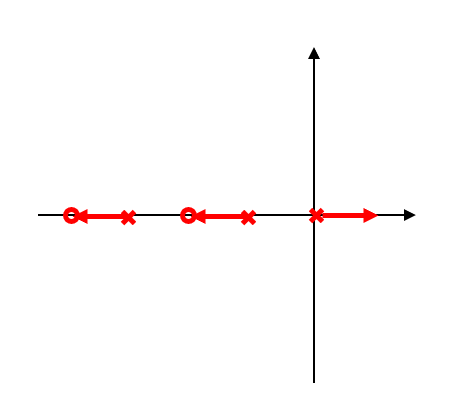
C: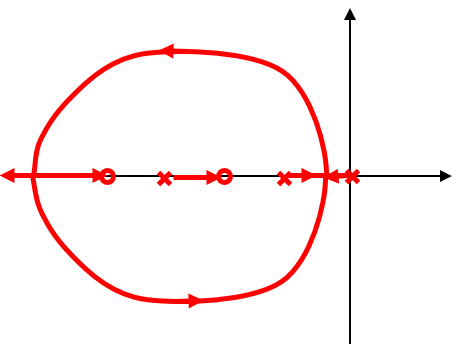
D: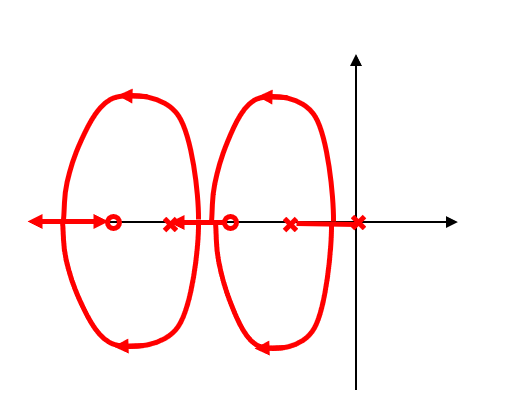
答案: 【
】
4、 问题:某系统根轨迹如图所示,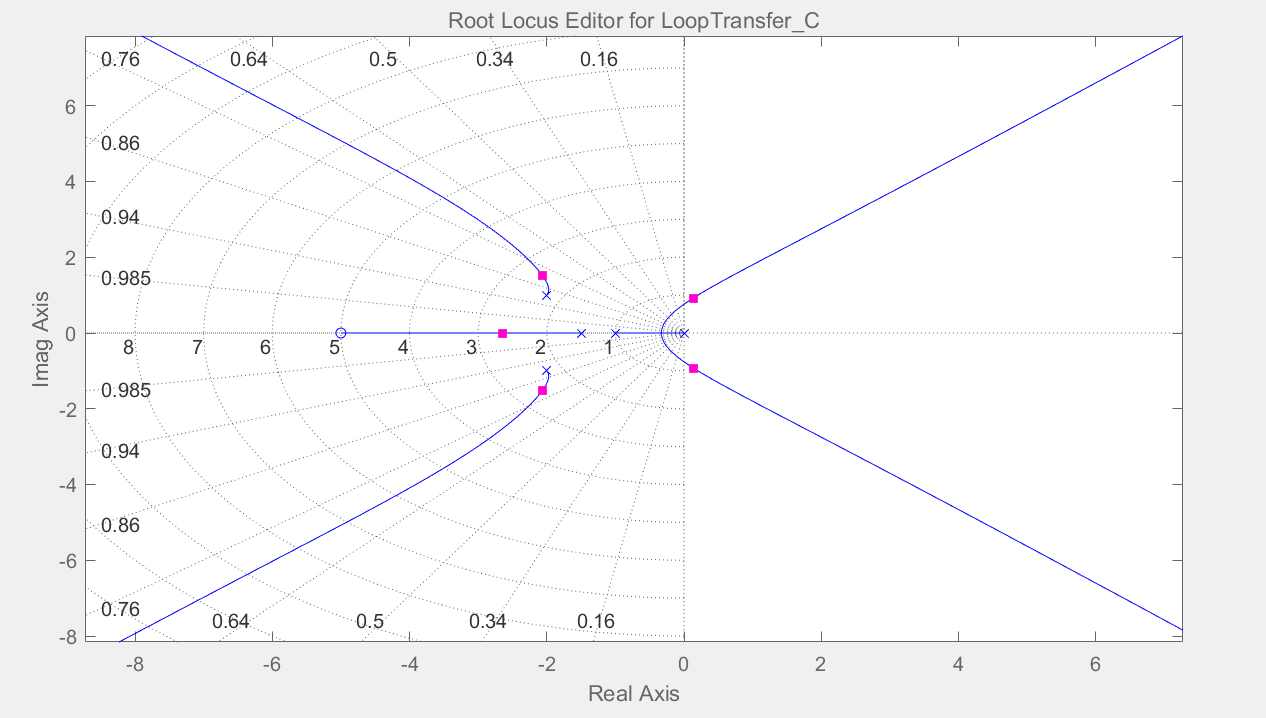
其中当k=3时,系统的特征根分布如图中红色方块所指,则下列说法正确的是( )。
选项:
A:可知系统此时稳定,主导极点的阻尼比约为0.8,无阻尼振荡频率<3。
B:可知系统此时稳定,没有明确的主导极点。
C:可知系统此时不稳定。
D:无法判断此时系统的特性。
答案: 【
可知系统此时不稳定。
】
5、 问题:某系统根轨迹如图所示,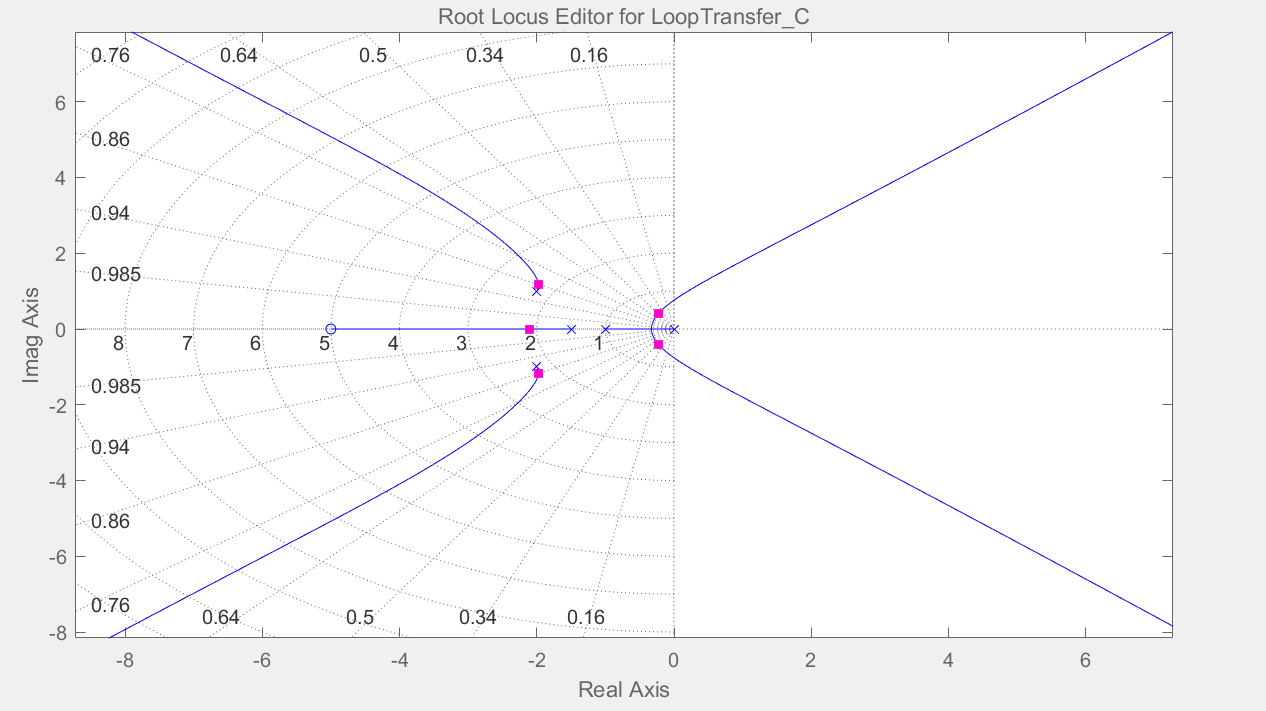
其中当k=1时,系统的特征根分布如图中红色方块所指,则下列说法正确的是( )。
选项:
A:可知系统此时稳定,主导极点的阻尼比约为0.9,无阻尼振荡频率<3。
B:可知系统此时稳定,主导极点的阻尼比约为0.5,无阻尼振荡频率<1。
C:可知系统此时稳定,没有明确的主导极点。
D:无法判断此时系统的特性。
答案: 【
可知系统此时稳定,主导极点的阻尼比约为0.5,无阻尼振荡频率<1。
】
6、 问题:开环传递函数中,适当增加左半平面的开环极点,会引起( )
选项:
A:根轨迹主导极点的渐近线向右弯曲,动态性能变好。
B:根轨迹主导极点的渐近线向右弯曲,动态性能变差。
C:根轨迹主导极点的渐近线向左弯曲,动态性能变好。
D:根轨迹主导极点的渐近线向左弯曲,动态性能变差。
答案: 【
根轨迹主导极点的渐近线向右弯曲,动态性能变差。
】
第六章 单元测试
1、 问题:若已知某LTI系统的频率特性函数 ,其输入为
,其输入为 ,则稳态输出为
,则稳态输出为 ( )
( )
选项:
A:
B:
C:
D:
答案: 【
】
2、 问题:已知某最小相位系统的幅相曲线如图所示,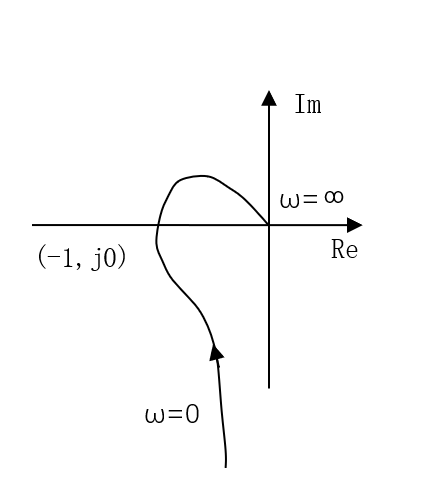
则其传递函数最有可能是( )。
选项:
A:
B:
C:
D:
答案: 【
】
3、 问题:已知系统的开环频率特性的极坐标图如下图所示,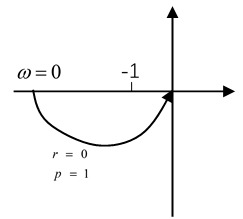
图中r是位于s平面原点的开环极点,p为位于右半s平面的开环极点数,则下面分析正确的是( )。
选项:
A:系统为0型系统,其闭环系统稳定。
B:系统为0型系统,其闭环系统不稳定。
C:系统为1型系统,其闭环系统稳定。
D:系统为1型系统,其闭环系统不稳定
答案: 【
系统为0型系统,其闭环系统稳定。
】
4、 问题:已知系统的开环频率特性的极坐标图如下图所示,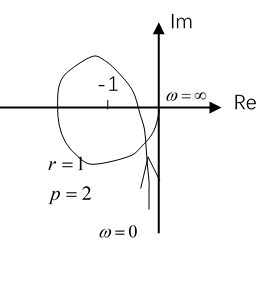
图中r是位于s平面原点的开环极点,p为位于右半s平面的开环极点数,则下面分析正确的是( )。
选项:
A:系统为1型系统,其闭环系统稳定。
B:系统为1型系统,其闭环系统不稳定。
C:系统为2型系统,其闭环系统稳定。
D:系统为2型系统,其闭环系统不稳定
答案: 【
系统为1型系统,其闭环系统稳定。
】
5、 问题:已知系统的开环传递函数为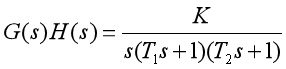 ,当K=10时,其奈氏图如下图所示,
,当K=10时,其奈氏图如下图所示,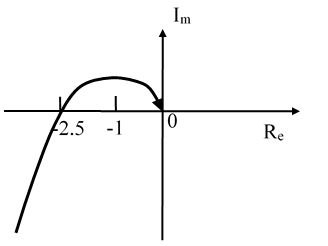
则下面分析正确的是( )。
选项:
A:该闭环系统稳定,且在K<11.5的范围内,系统都稳定。
B:该闭环系统稳定,且在K<25的范围内,系统都稳定。
C:该闭环系统不稳定,要系统稳定,则应为K<8.5。
D:该闭环系统不稳定,要系统稳定,则应为K<4
答案: 【
该闭环系统不稳定,要系统稳定,则应为K<4
】
6、 问题:已知某最小相位系统对数幅频特性近似如下图所示,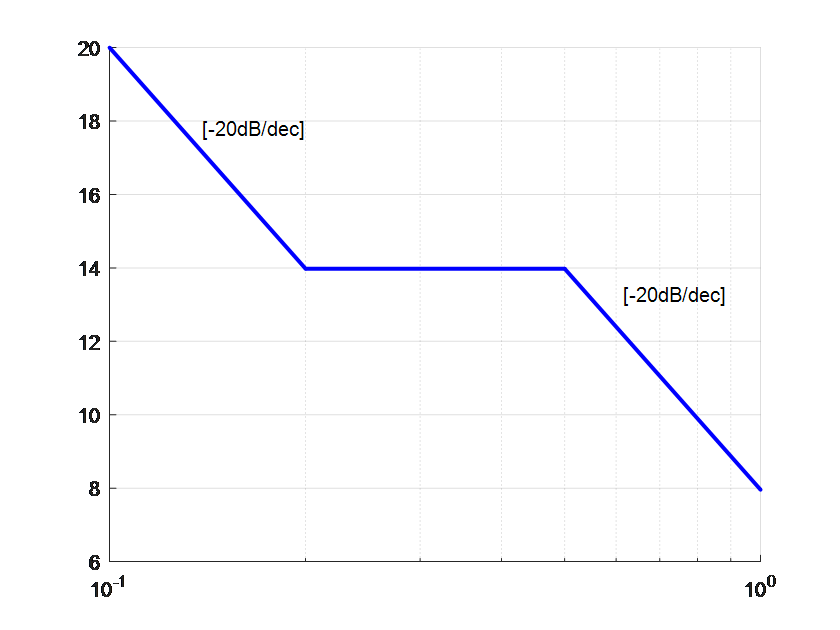
则其传函可能是( )
选项:
A:
B:
C:
D:
答案: 【
】
7、 问题:某最小相位系统传递函数为 ,则当
,则当 时,其对数幅频特性渐近线方程为
时,其对数幅频特性渐近线方程为
如无法购买,请复制网址,换浏览器打开
做题有答案,效率提高!使用过程中有疑问联系QQ55089918



智慧树答案")
智慧树答案")
")
智慧树答案")

还木有评论哦,快来抢沙发吧~